
我就废话不多说了,大家还是直接看代码吧!
import keras
from keras.datasets import cifar10
from keras.preprocessing.image import ImageDataGenerator
from keras.models import Sequential
from keras.layers import Dense, Dropout, Activation, Flatten
from keras.layers import Conv2D, MaxPooling2D, BatchNormalization
from keras import optimizers
import numpy as np
from keras.layers.core import Lambda
from keras import backend as K
from keras.optimizers import SGD
from keras import regularizers
#import data
(x_train, y_train), (x_test, y_test) = cifar10.load_data()
x_train = x_train.astype('float32')
x_test = x_test.astype('float32')
y_train = keras.utils.to_categorical(y_train, 10)
y_test = keras.utils.to_categorical(y_test, 10)
weight_decay = 0.0005
nb_epoch=100
batch_size=32
#layer1 32*32*3
model = Sequential()
model.add(Conv2D(64, (3, 3), padding='same',
input_shape=(32,32,3),kernel_regularizer=regularizers.l2(weight_decay)))
model.add(Activation('relu'))
model.add(BatchNormalization())
model.add(Dropout(0.3))
#layer2 32*32*64
model.add(Conv2D(64, (3, 3), padding='same',kernel_regularizer=regularizers.l2(weight_decay)))
model.add(Activation('relu'))
model.add(BatchNormalization())
model.add(MaxPooling2D(pool_size=(2, 2)))
#layer3 16*16*64
model.add(Conv2D(128, (3, 3), padding='same',kernel_regularizer=regularizers.l2(weight_decay)))
model.add(Activation('relu'))
model.add(BatchNormalization())
model.add(Dropout(0.4))
#layer4 16*16*128
model.add(Conv2D(128, (3, 3), padding='same',kernel_regularizer=regularizers.l2(weight_decay)))
model.add(Activation('relu'))
model.add(BatchNormalization())
model.add(MaxPooling2D(pool_size=(2, 2)))
#layer5 8*8*128
model.add(Conv2D(256, (3, 3), padding='same',kernel_regularizer=regularizers.l2(weight_decay)))
model.add(Activation('relu'))
model.add(BatchNormalization())
model.add(Dropout(0.4))
#layer6 8*8*256
model.add(Conv2D(256, (3, 3), padding='same',kernel_regularizer=regularizers.l2(weight_decay)))
model.add(Activation('relu'))
model.add(BatchNormalization())
model.add(Dropout(0.4))
#layer7 8*8*256
model.add(Conv2D(256, (3, 3), padding='same',kernel_regularizer=regularizers.l2(weight_decay)))
model.add(Activation('relu'))
model.add(BatchNormalization())
model.add(MaxPooling2D(pool_size=(2, 2)))
#layer8 4*4*256
model.add(Conv2D(512, (3, 3), padding='same',kernel_regularizer=regularizers.l2(weight_decay)))
model.add(Activation('relu'))
model.add(BatchNormalization())
model.add(Dropout(0.4))
#layer9 4*4*512
model.add(Conv2D(512, (3, 3), padding='same',kernel_regularizer=regularizers.l2(weight_decay)))
model.add(Activation('relu'))
model.add(BatchNormalization())
model.add(Dropout(0.4))
#layer10 4*4*512
model.add(Conv2D(512, (3, 3), padding='same',kernel_regularizer=regularizers.l2(weight_decay)))
model.add(Activation('relu'))
model.add(BatchNormalization())
model.add(MaxPooling2D(pool_size=(2, 2)))
#layer11 2*2*512
model.add(Conv2D(512, (3, 3), padding='same',kernel_regularizer=regularizers.l2(weight_decay)))
model.add(Activation('relu'))
model.add(BatchNormalization())
model.add(Dropout(0.4))
#layer12 2*2*512
model.add(Conv2D(512, (3, 3), padding='same',kernel_regularizer=regularizers.l2(weight_decay)))
model.add(Activation('relu'))
model.add(BatchNormalization())
model.add(Dropout(0.4))
#layer13 2*2*512
model.add(Conv2D(512, (3, 3), padding='same',kernel_regularizer=regularizers.l2(weight_decay)))
model.add(Activation('relu'))
model.add(BatchNormalization())
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Dropout(0.5))
#layer14 1*1*512
model.add(Flatten())
model.add(Dense(512,kernel_regularizer=regularizers.l2(weight_decay)))
model.add(Activation('relu'))
model.add(BatchNormalization())
#layer15 512
model.add(Dense(512,kernel_regularizer=regularizers.l2(weight_decay)))
model.add(Activation('relu'))
model.add(BatchNormalization())
#layer16 512
model.add(Dropout(0.5))
model.add(Dense(10))
model.add(Activation('softmax'))
# 10
sgd = SGD(lr=0.01, decay=1e-6, momentum=0.9, nesterov=True)
model.compile(loss='categorical_crossentropy', optimizer=sgd,metrics=['accuracy'])
model.fit(x_train,y_train,epochs=nb_epoch, batch_size=batch_size,
validation_split=0.1, verbose=1)
补充知识:pytorch一步一步在VGG16上训练自己的数据集
准备数据集及加载,ImageFolder
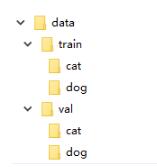
在很多机器学习或者深度学习的任务中,往往我们要提供自己的图片。也就是说我们的数据集不是预先处理好的,像mnist,cifar10等它已经给你处理好了,更多的是原始的图片。比如我们以猫狗分类为例。在data文件下,有两个分别为train和val的文件夹。然后train下是cat和dog两个文件夹,里面存的是自己的图片数据,val文件夹同train。这样我们的数据集就准备好了。
ImageFolder能够以目录名作为标签来对数据集做划分,下面是pytorch中文文档中关于ImageFolder的介绍:

#对训练集做一个变换 train_transforms = transforms.Compose([ transforms.RandomResizedCrop(224), #对图片尺寸做一个缩放切割 transforms.RandomHorizontalFlip(), #水平翻转 transforms.ToTensor(), #转化为张量 transforms.Normalize((.5, .5, .5), (.5, .5, .5)) #进行归一化 ]) #对测试集做变换 val_transforms = transforms.Compose([ transforms.Resize(256), transforms.RandomResizedCrop(224), transforms.ToTensor(), transforms.Normalize((.5, .5, .5), (.5, .5, .5)) ]) train_dir = "G:/data/train" #训练集路径 #定义数据集 train_datasets = datasets.ImageFolder(train_dir, transform=train_transforms) #加载数据集 train_dataloader = torch.utils.data.DataLoader(train_datasets, batch_size=batch_size, shuffle=True) val_dir = "G:/datat/val" val_datasets = datasets.ImageFolder(val_dir, transform=val_transforms) val_dataloader = torch.utils.data.DataLoader(val_datasets, batch_size=batch_size, shuffle=True)
迁移学习以VGG16为例
下面是迁移代码的实现:
class VGGNet(nn.Module):
def __init__(self, num_classes=2): #num_classes,此处为 二分类值为2
super(VGGNet, self).__init__()
net = models.vgg16(pretrained=True) #从预训练模型加载VGG16网络参数
net.classifier = nn.Sequential() #将分类层置空,下面将改变我们的分类层
self.features = net #保留VGG16的特征层
self.classifier = nn.Sequential( #定义自己的分类层
nn.Linear(512 * 7 * 7, 512), #512 * 7 * 7不能改变 ,由VGG16网络决定的,第二个参数为神经元个数可以微调
nn.ReLU(True),
nn.Dropout(),
nn.Linear(512, 128),
nn.ReLU(True),
nn.Dropout(),
nn.Linear(128, num_classes),
)
def forward(self, x):
x = self.features(x)
x = x.view(x.size(0), -1)
x = self.classifier(x)
return x
完整代码如下
from __future__ import print_function, division
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transforms
from torch.autograd import Variable
import numpy as np
from torchvision import models
batch_size = 16
learning_rate = 0.0002
epoch = 10
train_transforms = transforms.Compose([
transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize((.5, .5, .5), (.5, .5, .5))
])
val_transforms = transforms.Compose([
transforms.Resize(256),
transforms.RandomResizedCrop(224),
transforms.ToTensor(),
transforms.Normalize((.5, .5, .5), (.5, .5, .5))
])
train_dir = './VGGDataSet/train'
train_datasets = datasets.ImageFolder(train_dir, transform=train_transforms)
train_dataloader = torch.utils.data.DataLoader(train_datasets, batch_size=batch_size, shuffle=True)
val_dir = './VGGDataSet/val'
val_datasets = datasets.ImageFolder(val_dir, transform=val_transforms)
val_dataloader = torch.utils.data.DataLoader(val_datasets, batch_size=batch_size, shuffle=True)
class VGGNet(nn.Module):
def __init__(self, num_classes=3):
super(VGGNet, self).__init__()
net = models.vgg16(pretrained=True)
net.classifier = nn.Sequential()
self.features = net
self.classifier = nn.Sequential(
nn.Linear(512 * 7 * 7, 512),
nn.ReLU(True),
nn.Dropout(),
nn.Linear(512, 128),
nn.ReLU(True),
nn.Dropout(),
nn.Linear(128, num_classes),
)
def forward(self, x):
x = self.features(x)
x = x.view(x.size(0), -1)
x = self.classifier(x)
return x
#--------------------训练过程---------------------------------
model = VGGNet()
if torch.cuda.is_available():
model.cuda()
params = [{'params': md.parameters()} for md in model.children()
if md in [model.classifier]]
optimizer = optim.Adam(model.parameters(), lr=learning_rate)
loss_func = nn.CrossEntropyLoss()
Loss_list = []
Accuracy_list = []
for epoch in range(100):
print('epoch {}'.format(epoch + 1))
# training-----------------------------
train_loss = 0.
train_acc = 0.
for batch_x, batch_y in train_dataloader:
batch_x, batch_y = Variable(batch_x).cuda(), Variable(batch_y).cuda()
out = model(batch_x)
loss = loss_func(out, batch_y)
train_loss += loss.data[0]
pred = torch.max(out, 1)[1]
train_correct = (pred == batch_y).sum()
train_acc += train_correct.data[0]
optimizer.zero_grad()
loss.backward()
optimizer.step()
print('Train Loss: {:.6f}, Acc: {:.6f}'.format(train_loss / (len(
train_datasets)), train_acc / (len(train_datasets))))
# evaluation--------------------------------
model.eval()
eval_loss = 0.
eval_acc = 0.
for batch_x, batch_y in val_dataloader:
batch_x, batch_y = Variable(batch_x, volatile=True).cuda(), Variable(batch_y, volatile=True).cuda()
out = model(batch_x)
loss = loss_func(out, batch_y)
eval_loss += loss.data[0]
pred = torch.max(out, 1)[1]
num_correct = (pred == batch_y).sum()
eval_acc += num_correct.data[0]
print('Test Loss: {:.6f}, Acc: {:.6f}'.format(eval_loss / (len(
val_datasets)), eval_acc / (len(val_datasets))))
Loss_list.append(eval_loss / (len(val_datasets)))
Accuracy_list.append(100 * eval_acc / (len(val_datasets)))
x1 = range(0, 100)
x2 = range(0, 100)
y1 = Accuracy_list
y2 = Loss_list
plt.subplot(2, 1, 1)
plt.plot(x1, y1, 'o-')
plt.title('Test accuracy vs. epoches')
plt.ylabel('Test accuracy')
plt.subplot(2, 1, 2)
plt.plot(x2, y2, '.-')
plt.xlabel('Test loss vs. epoches')
plt.ylabel('Test loss')
plt.show()
# plt.savefig("accuracy_loss.jpg")
以上这篇keras实现VGG16 CIFAR10数据集方式就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持脚本之家。











